Microrobots and Miniaturize Devices for Minimally-invasive Surgery
Participating Researchers
Current members: Dr. Jiyuan Tian, Moonkwang Jeong, Felix Fischer, Ann-Sophia Müller
Former members: Dr. Christian Gletter, Xinyi Guo, Yangchao Zhou
Micro-/nano-robots can open up new possibilities for many biomedical applications, for example, they may allow targeted drug delivery, in vivo sensing and stimulation, and even new minimally-invasive surgical procedures. However, current micro-/nano-robots are still far from clinical usage, since the lack of efficient propulsion mechanisms in real biological media severely hamper progress towards real applications. Most current micro-/nano-robots can propel in water (and viscous fluids), however, the same propulsion mechanisms do not readily transfer to viscoelastic materials, which include almost all biological media [ref 1]. The research of the group sets the target of wirelessly powering and controlling small-scale robots to move on and penetrate through soft biological tissues [ref 2]. The group is working on an exciting ERC starting grant project "VIBEBOT" (Vibrational Microrobots in Viscoelastic Biological Tissues) and aim at deep tissue penetration and sensing with intelligent microsystems.
Miniaturize robots for endoscopic surgery
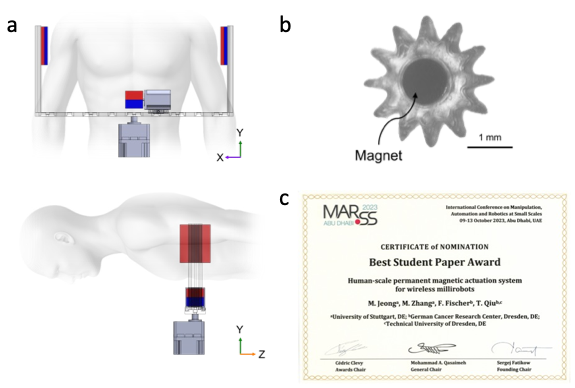
Figure 1. Miniaturize robots for endoscopic surgery. (a) A human-scale magnetic actuation set-up to actuate the miniaturize robots in the human body for minimally-invasive surgery. (b) One design of a 3D printed GearBot for crawling on slippery biological surfaces. (c) The paper won the award nomination of The Best Student Paper at MARSS 2023 [ref 4].
© dkfz.de
Traditional electromagnetic actuation systems often have limited accessible volume, which restricts the controllable working space of the robots for in vivo medical applications at human scale. In this project, we develop a new magnetic actuation set-up comprised of a pair of static magnets and a rotating magnet, which generates a rotational magnetic field vector on a virtual conical surface, in a large accessible volume of 50 × 15 × 20 cm3. The magnetic field is numerically simulated and verified by experiments. We made a magnetic millirobot that can walk on slippery biological surface for targeted fluidic injection [ref 3]. A millimeter-sized, gear-shaped magnetic robot (GearBot, see Fig. 1) with sharp spikes is also developed. We demonstrate its ability to crawl on biological tissue surfaces with full controllability to follow designed complicated trajectories. The permanent magnetic actuation set-up, which requires neither an expensive power amplifier nor a coil cooling system has a large enough accessible volume that can in future accommodate a human patient. The project was presented at IEEE MARSS conference 2023 [ref 4], and won the award nomination of "The Best Student Paper".
On-demand drug delivery implant
Key collaborator:
Prof. Xuexin Duan, Tianjin University, China
On-demand controlled drug delivery is essential for the treatment of chronic diseases. The drug is released at the time when required, thus its efficacy is boosted and the side effects are minimized. However, most state-of-the-art drug delivery methods rely on passive diffusion, which is slow and uncontrollable. Active drug delivery methods, such as thermopneumatic pumps and electromagnetic valves were recently developed for controlled drug release, however, they still suffer from slow response and large device size.
In this project, we developed a miniaturized microfluidic device for wirelessly controlled ultrafast active drug delivery, driven by a radio-frequency oscillating solid-liquid interface (Fig. 2) [ref 5]. The oscillation generates acoustic streaming in the drug reservoir, which opens an elastic valve to emit the drug. High-speed microscopy reveals that the fast response of the delivery is on the order of 1 ms, which is more than three orders of magnitude faster than the start-of-the-art. The amount of the released drug can be precisely controlled with time and the power applied. The trigger of the release is wirelessly controlled via a magnetic field, and the system shows stable output in a continuous experiment for two weeks. The integrated microfluidic device shows great promise as a long-term controlled drug delivery implant for chronic diseases.
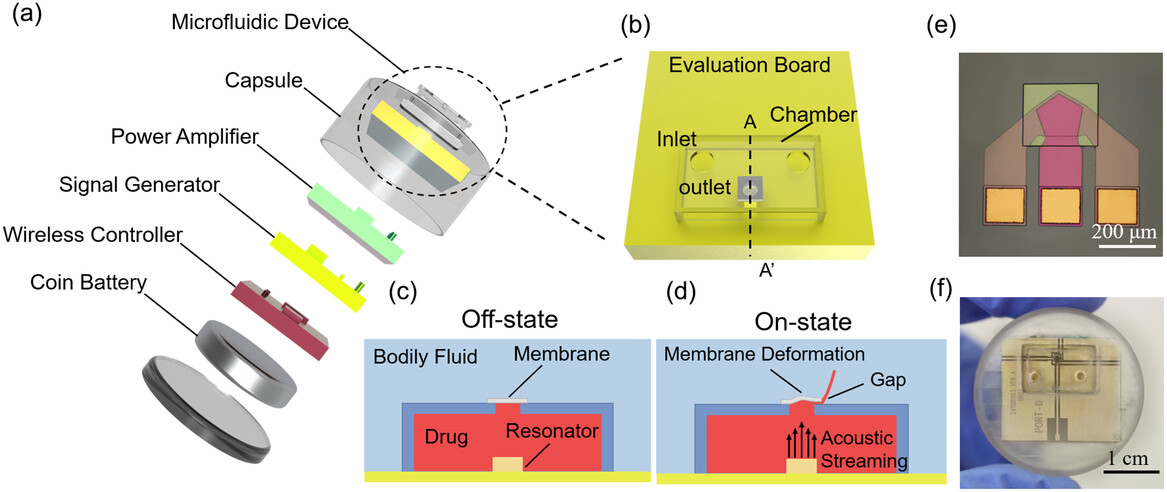
Figure 2. On-demand implantable drug delivery device. (a) The exploded view of the implantable drug delivery system. (b) The schematic illustration of the microfluidic module. (c) and (d) The schematic sectional view of section A-A during off-state and on-state of the resonator, respectively. (e) The top view of the gigahertz acoustic resonator. (f) The assembled drug delivery device. [ref 5]
© dkfz.de
Key publications
1) Qiu, T. et al. (2014): Swimming by reciprocal motion at low Reynolds number, Nature Communication., 5, 5119, DOI Link.
2) Li, D. et al. (2019): A helical microrobot with an optimized propeller-shape for the propulsion in viscoelastic biological media, Robotics, 8, 87, DOI Link.
3) Jeong, M. et al. (2023): A Magnetic Millirobot Walks on Slippery Biological Surfaces for Targeted Cargo Delivery, Micromachines, 14, 1439, DOI Link.
4) Jeong, M. et al. (2023): A Human-scale Permanent Magnetic Actuation System for Wireless Millirobots, IEEE Inter. Conf. on Manipulation, Automation and Robotics at Small Scales (MARSS), Talk.
5) Zhou et al. (2024): A Miniaturized Device for Ultrafast On-demand Drug Release based on a Gigahertz Ultrasonic Resonator, Advanced Engineering Material, DOI Link.